五年前,浙江大学控制科学与工程学院的一间会议室里,刚从剑桥微软研究院归来的叶琦,向课题组成员描绘了一个令人振奋的长聘愿景:五年后,她希望让机器人出现在答辩会现场,亲自为在座的评委们端茶倒水。这一想法在当时显得颇具挑战性,尤其是对这位非机器人科班出身的学者来说。
叶琦的学术旅程始于北京师范大学的本科学习,她选择了计算机视觉作为自己的研究方向。随后,她进入清华大学攻读硕士学位,并在英国帝国理工学院完成了博士学位。在博士期间,她因手势识别研究在学术会议上崭露头角,吸引了剑桥微软研究院微混合现实与人工智能实验室负责人Jamie Shotton的注意。
Jamie Shotton的邀请让叶琦有机会进入微软研究院交流,这次交流最终演变为一场“招贤令”。面对学术大牛Jamie Shotton和计算机视觉经典教材作者Christopher M. Bishop,叶琦最终决定加入微软团队,投身于当时正升温的MR/VR技术研究。2019年,微软发布的第二代Hololens头戴MR设备,正是叶琦团队的研究成果之一。
然而,一年多后,出于对自由探索前沿技术的热爱,叶琦选择回到浙江大学任职。浙大给予了她充分的学术自由,让她能够自主选择研究方向。最终,叶琦决定转向机器人领域,聚焦于灵巧手研究,尽管这意味着她需要从头开始学习新知识。
叶琦的选择并非没有挑战。机器人领域的研究在当时相对冷清,尤其是灵巧手研究,更是鲜有人问津。但叶琦看到了机会,她相信未来机器人与计算机视觉、计算机图形学的融合将催生新的研究领域。这一预言如今正在成为现实,随着具身智能热潮的兴起,不同学科背景的研究者开始汇聚在这一新的交叉点上。
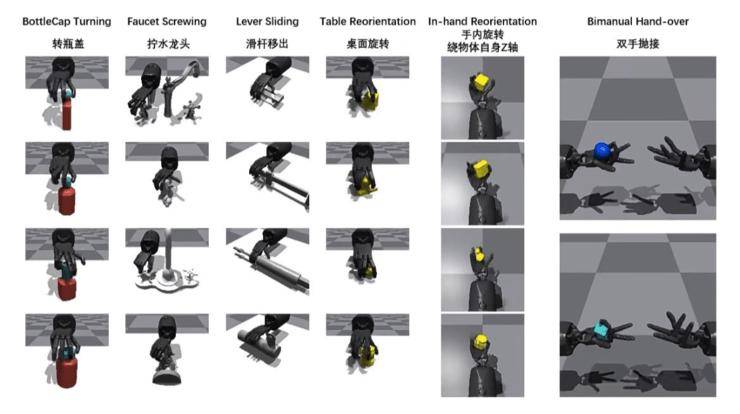
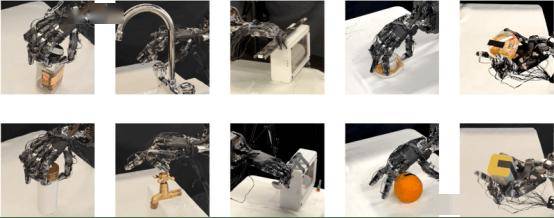
叶琦课题组的研究进展迅速。2024年,他们发布并开源了大规模灵巧手抓取动作数据集GraspM3,包含超过100万条抓取轨迹和8000多个物体,为机器人抓取研究提供了丰富的数据资源。随后,他们又推出了视触预训练与灵巧操作的数据集与基准,进一步推动了灵巧手领域的发展。
叶琦的研究聚焦于灵巧操作的智能化技术,她希望实现的目标是:让任何配备触觉传感器或其他传感器的灵巧手都能自主完成各类操作任务。为了实现这一目标,她和团队正在努力降低灵巧手领域的进入门槛,通过开源代码和平台,让更多人能够参与到这一领域的研究中来。
在谈及研究经历时,叶琦表示,她的兴趣始于本科阶段的图像处理课程。她发现图像处理能够给予明确的反馈,这让她对计算机视觉产生了浓厚的兴趣。在清华读研期间,她继续深入研究图像处理算法和算子。到了博士阶段,她则开始从事手势跟踪研究,这一研究对手势交互具有重要意义。
叶琦在微软亚洲研究院的实习经历也让她对图像安全领域有了更深入的了解。她参与了研究网站利用扭曲字符图片防止恶意访问的项目,这一经历让她对图像识别技术的安全性和鲁棒性有了更深刻的认识。
在谈及为何选择从产业界转向学术界时,叶琦表示,她在微软研究院工作期间发现,做产品与开展前沿技术研究之间存在很大的差距。她更喜欢在高校从事研究工作,因为这里能够给予她更多的学术自由和研究方向选择权。
对于为何选择灵巧手作为研究方向,叶琦表示,她看到了机器人与计算机视觉、计算机图形学融合的趋势。她相信未来灵巧手将成为这一融合领域的重要组成部分。尽管灵巧手研究在当时面临诸多挑战,但叶琦认为正是这些挑战让她看到了机会。
叶琦课题组的研究进展不仅体现在数据集的构建上,还体现在算法的创新上。他们通过引入触觉模态和自监督学习方式,显著提升了灵巧手对复杂操作任务的执行效果。这一研究成果让他们更加坚定了从触觉-动作态关联入手的研究方向。

叶琦表示,未来他们将继续推进灵巧手研究,降低进入门槛,吸引更多人参与到这一领域中来。她相信在不久的将来,灵巧手将在各种应用场景中发挥重要作用,为人类生活带来更多便利。